Week 1: Recurrent Neural Networks
Recurrent neural networks have been proven to perform extremely well on temporal data. This model has several variants including LSTMs, GRUs and Bidirectional RNNs, which you are going to learn about in this section.
Why sequence models?
Recurrent neural networks (RNNs) have proven to be incredibly powerful networks for sequence modelling tasks (where the inputs x, outputs y or both are sequences) including:
- speech recognition
- music generation
- sentiment classification
- DNA sequence analysis
- machine translation
- video activity recognition
- named entity recognition
Notation
As a motivating example, we will "build" a model that performs named entity recognition (NER).
Example input:
We want our model to output a target vector with the same number elements as our input sequence x, representing the named entities in x.
We will refer to each element in our input (x) and output (y) sequences with angled brackets, so for example, x^{<1>} would refer to "Harry". Because we have multiple input sequences, we denote the i-th sequence x^{(i)} (and its corresponding output sequence y^{(i)}). The t-th element of the i-th input sequence is therefore x^{(i)<t>}.
Let T_x be the length of the input sequence and T_y the length of the output sequence.
Note
In our example, T_x == T_y
Representing words
For NLP applications, we have to decide on some way to represent words. Typically, we start by generating a vocabulary (a dictionary of all the words that appear in our corpus).
Note
In modern applications, a vocabulary of 30-50K is common and massive vocabularies (>1 million word types) are often used in commercial applications, especially by big tech.
A common way to represent each word is to use a one-hot encoding. In this way, we represent each token by a vector of dimension ||V|| (our vocabulary size).
Example:
x^{<1>} of our sequence (i.e. the token Harry) is represented as a vector which contains all zeros except for a single value of one at row j, where j is its position in V.
Note
"One-hot" refers to the fact that each vector contains only a single 1.
The goal is to learn a mapping from each x^{<t>} to some tag (i.e. PERSON).
Note
To deal with out-of-vocabulary (OOV) tokens, we typically assign a special value <UNK> and a corresponding vector.
Recurrent Neural Network Model
Why not a standard network?
In our previous example, we had 9 input words. You could imagine taking these 9 input words (represented as one-hot encoded vectors) as inputs to a "standard" neural network

This turns out not to work well. There are two main problems:
- Inputs and outputs can be different lengths in different examples (its not as if every T_x, T_y pair is of the same length).
- A "standard" network doesn't share features learned across different positions of text. This is a problem for multiple reasons, but a big one is that this network architecture doesn't capture dependencies between elements in the sequence (e.g., the information that is a word in its context is not captured).
Recurrent Neural Networks
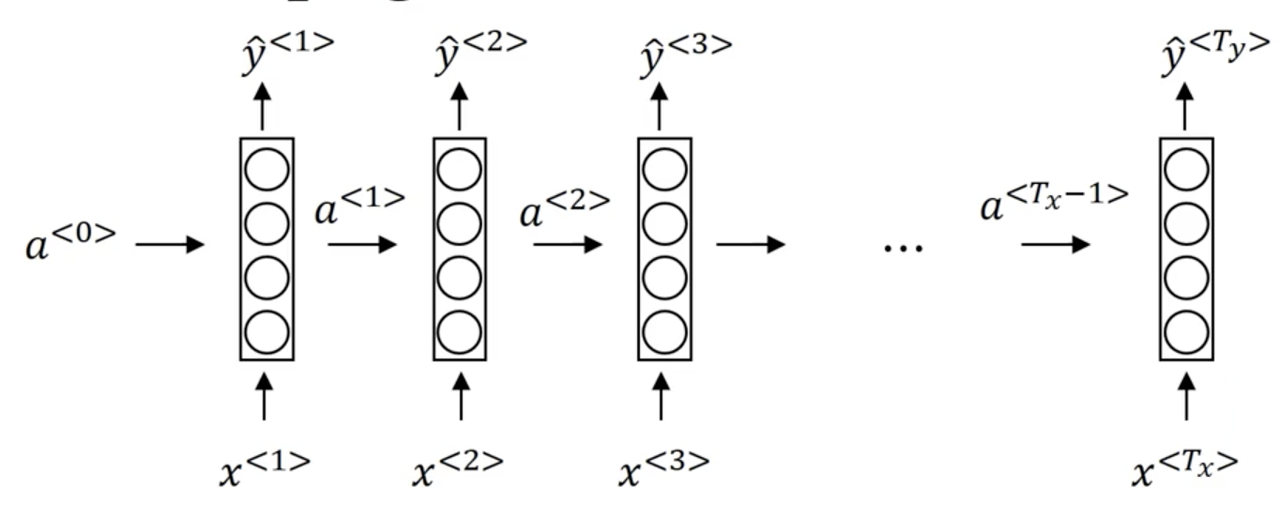
Unlike a "standard" neural network, recurrent neural networks (RNN) accept input from the previous timestep in a sequence. For our example x above, the unrolled RNN diagram might look like the following:

Note
Timestep 0 is usually initialized with a fake vector of 0's
Note that the diagram is sometimes drawn like this:

Where the little black box represented a delay of 1 timestep.
A RNN learns on a sequence from left to right, sharing the parameters from each timestep.
- the parameters governing the connection from x^{<t>} to the hidden layer will be some set of parameters we're going to write as W_{ax}.
- the activations, the horizontal connections, will be governed by some set of parameters W_{aa}
- W_{ya}, governs the output predictions
Note
We take the notation W_{ya}, to mean (for example) that the parameters for variable y are obtained by multiplying by some quantity a.
Notice this parameter sharing means that when we make the prediction for, y^{<3>} say, the RNN gets the information not only from x^{<3>} but also from the all the previous timesteps.
Note a potential weakness here. We don't incorporate information from future timesteps in our predictions. This problem is solved by using bidirectional RNNs (BRNNs) which we discuss in a future video.
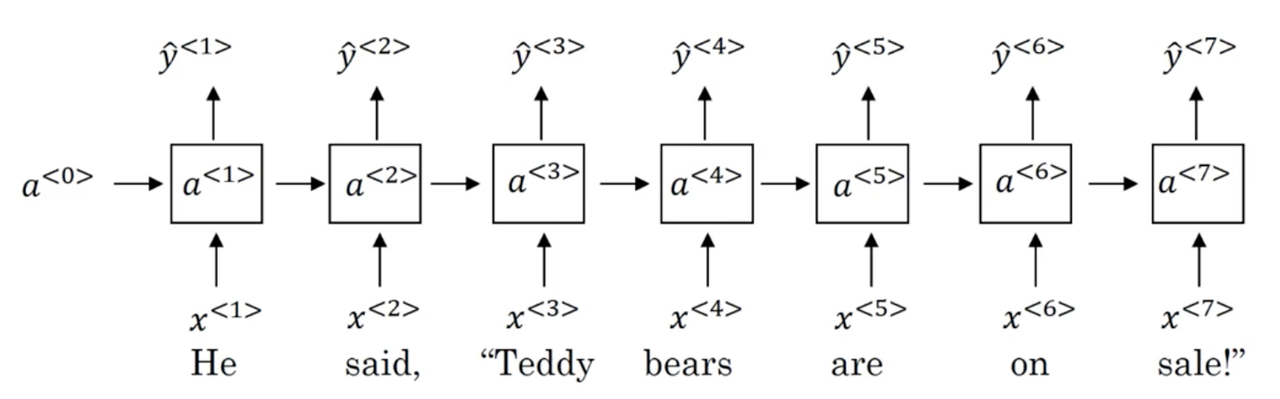
Example:
Given the sentences:
x^{(1)}: He said, "Teddy Roosevelt was a great President"
x^{(2)}: He said, "Teddy bears are on sale!"
And the task of named entity recognition (NER), it would be really useful to know that the word "President" follows the name "Teddy Roosevelt" because as the second example suggest, using only previous information in the sequence might not be enough to make a classification decision about an entity.
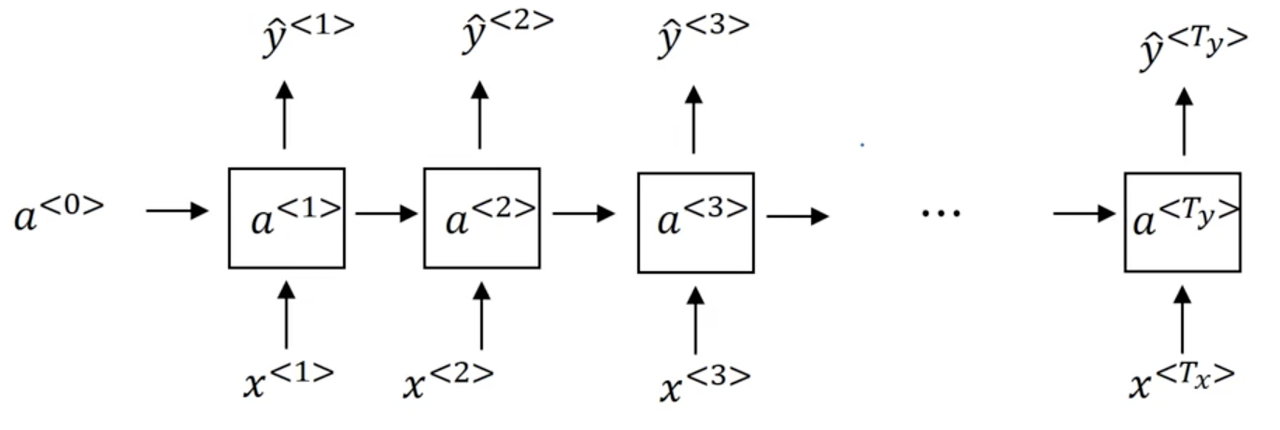
RNN Computation
Lets dig deeper into how a RNN works. First, lets start with a cleaned up depiction of our network
Forward Propagation
Typically, we start off with the input a^{<0>} = \vec 0. Then we perform our forward pass
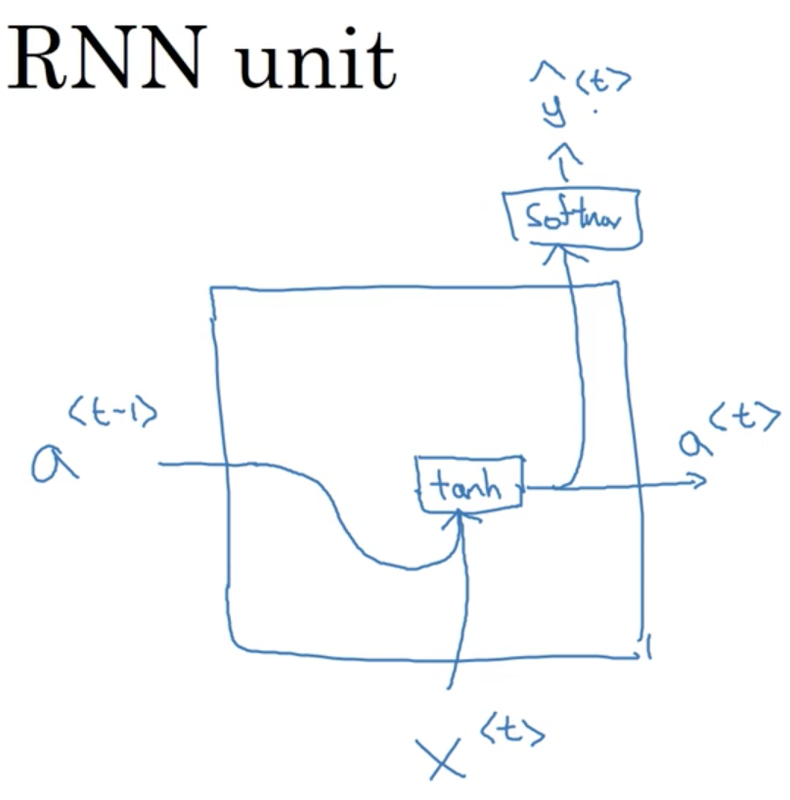
- Compute our activation for timestep 1: a^{<1>} = g(W_{aa}a^{<0>} + W_{ax}x^{<1>} + b_a)
- Compute our prediction for timestep 1: \hat y^{<1>} = g(W_{ya}a^{<1>} + b_y)
More generally:
Note
Where b is our bias vector.
The activation function used for the units of a RNN is most commonly tanh, although ReLU is sometimes used. For the output units, it depends on our problem. Often sigmoid / softmax are used for binary and multi-class classification problems respectively.
Simplified RNN Notation
Lets take the general equations for forward propagation we developed above:
We define our simplified hidden activation formulation:
Where
Note
W_a[a^{<t-1>}, x^{<t>}] = W_{aa}a^{<t-1>} + W_{ax}x^{<t>}
The advantages of this notation is that we can compress two parameter matrices into one.
And our simplified output activation formulation:
Backpropagation through time
Forward propagation
We have seen at a high-level how forward propagation works for an RNN. Essentially, we forward propagate the input, multiplying it by our weight matrices and applying our activation for each timestep until we have outputted a prediction for each timestep in the input sequence.
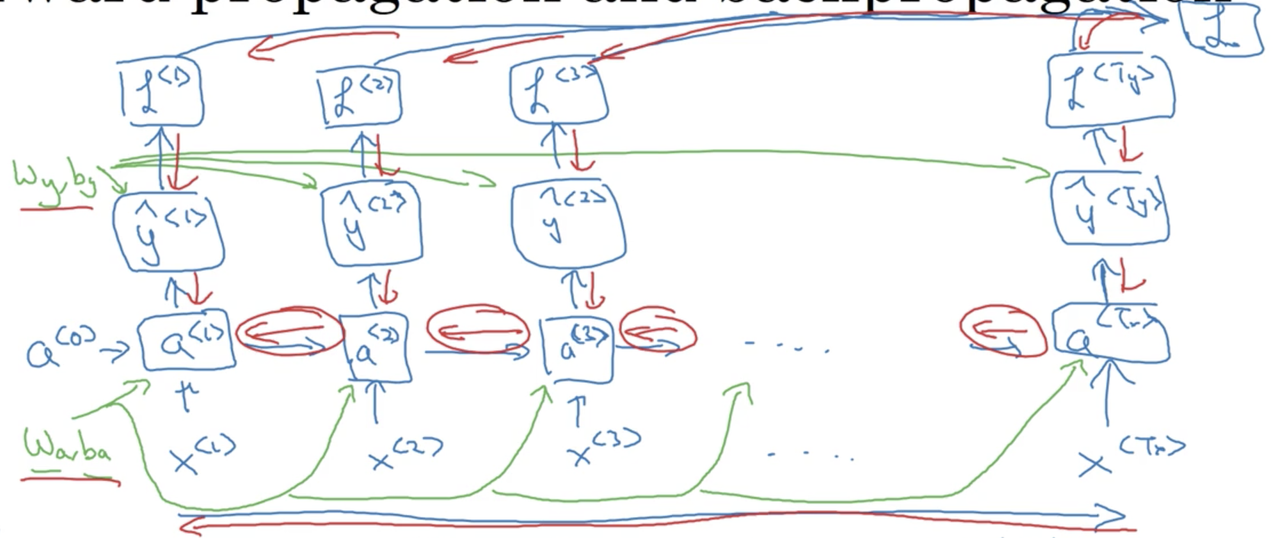
More explicitly, we can represent the process of foward propogation as a series of matrix multiplications in diagram form:

Backward propogation through time (BPTT)
In order to perform backward propagation through time (BPTT), we first have to specify a loss function. We will choose cross-entropy loss (we also saw this when discussing logisitc regression):
For a single prediction (timestep)
For all predictions
While not covered in detail here, BPTT simply involves applying our loss function to each prediction at each timestep, and then using this information along with the chain rule to compute the gradients we will need to update our parameters and assign blame proportionally. The entire process might look something like the following:
Different types of RNNs
So far, we have only seen an RNN where the input and output are both sequences of lengths \gt 1. Particularly, our input and output sequences were of the same length (T_x == T_y), For many applications, T_x \not = T_y.
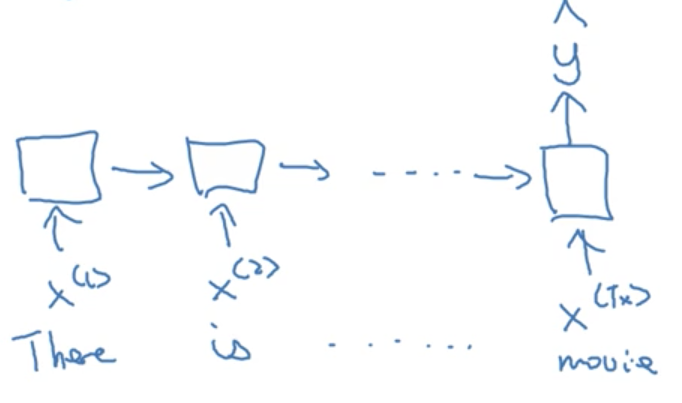
Take sentiment classification for example, where the input is typically a sequence (of text) and the output a integer scale (a 1-5 star review, for example).
Example:
x: "There is nothing to like in this movie"
We want our network to output a single prediction from 1-5. This is an example of a many-to-one architecture.
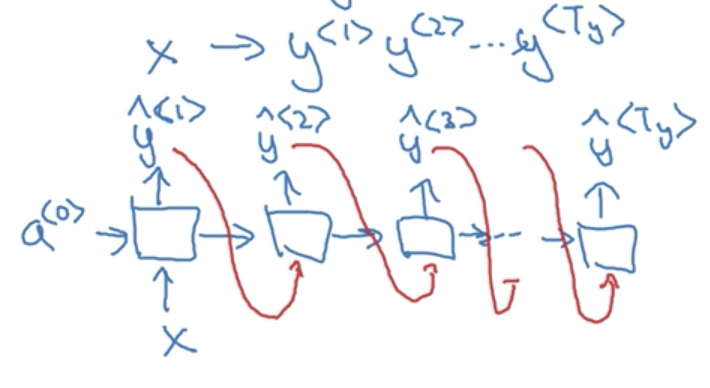
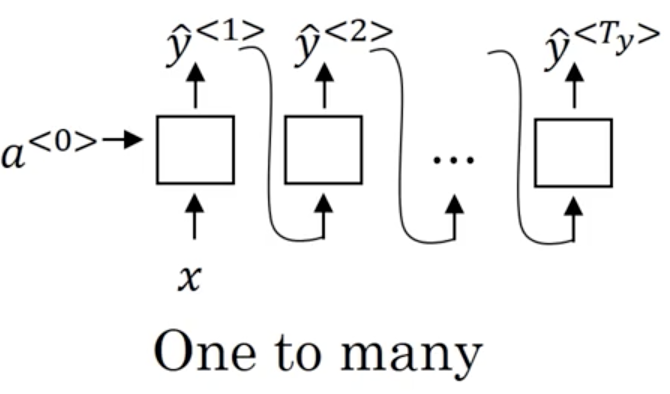
Another type of RNN architecture is one-to-many. An example of this architecture is music generation, where we might input an integer (indicating a genre) or the 0-vector (no input) and generate musical notes as our output. In this case, we input a single value to the network at timestep 1, and then propagate that input through the network (the remaining timesteps), with the caveat that in this architecture, we often take the ouput from the previous timestep and feed it to the next timestep:
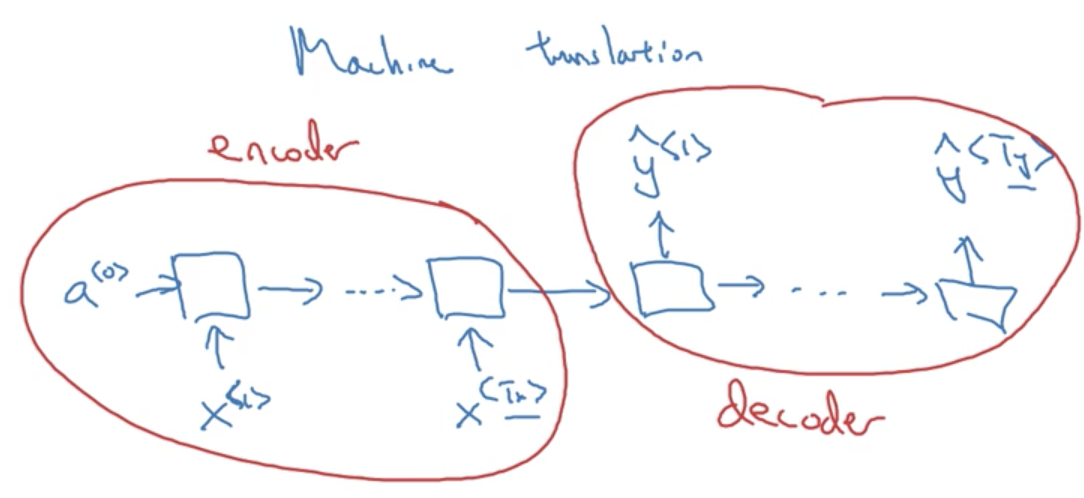
The final example is a many-to-many architecture. Unlike our previous example where T_x == T_y, in machine translation T_x \not = T_y, as the number of words in the input sentence (say, in english) is not necessarily the same as the output sentence (say, in french). These problems are typicaly solved with sequence to sequence models, that are composed of distinct encoder and decoder RNNs.
Summary of RNN types
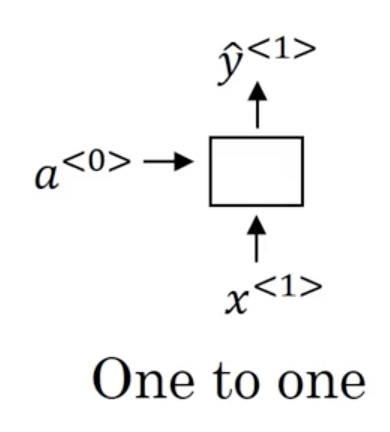
- One-to-one: a standard, generic neural network. Strictly speaking, you wouldn't model this problem with an RNN.
- One-to-many: Where our input is a single value (or in some cases, a null input represented by the 0-vector) which propogates through the network and our output is a sequence. Often, we use the prediction from the previous timestep when computing the hidden activations. An example is music generation or sequence generation more generally.
- Many-to-one: Where our input is a sequence and our output is a single value. Typically we take the prediction from the last timestep of the RNN. An example is sentiment classification

-
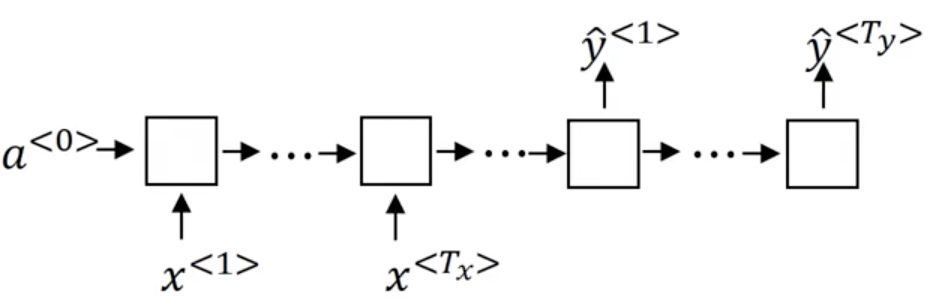
Many-to-many: Where both our input and outputs are sequences. These sequence are not necessarily the same length (T_x \not = T_y).
-
When T_x == T_y our architecture looks like a standard RNN:

- and when T_x \not = T_y are architecture is a sequence to sequence model which looks like:
Language model and sequence generation
Language modeling is one of the most basic and important tasks in natural language processing. It's also one that RNNs handle very well.
What is a language modeling?
Let's say you are building a speech recognition system and you hear the sentence:
How does a neural network determine whether the speaker said pear or pair (never mind that the correct answer is obvious to us). The answer is that the network encodes a language model. This language model is able to determine the probability of a given sentence (think of this as a measure of "correctness" or "goodness"). For example, our language model might output:
This system would then pick the much more likely second option.
Language modeling with an RNN
We start with a large corpus of english text. The first step is to tokenize the text in order to form a vocabulary
These tokens are then one-hot encoded or mapped to indices. Sometimes, a special end-of-sentence token is appended to each sequence (<EOS>).
Note
What if some of the words we encounter are not in our vocabulary? Typically we add a special token, <UNK> to deal with this problem.
Finally, we build an RNN to model the likelihood of any given sentence, learned from the training corpus.
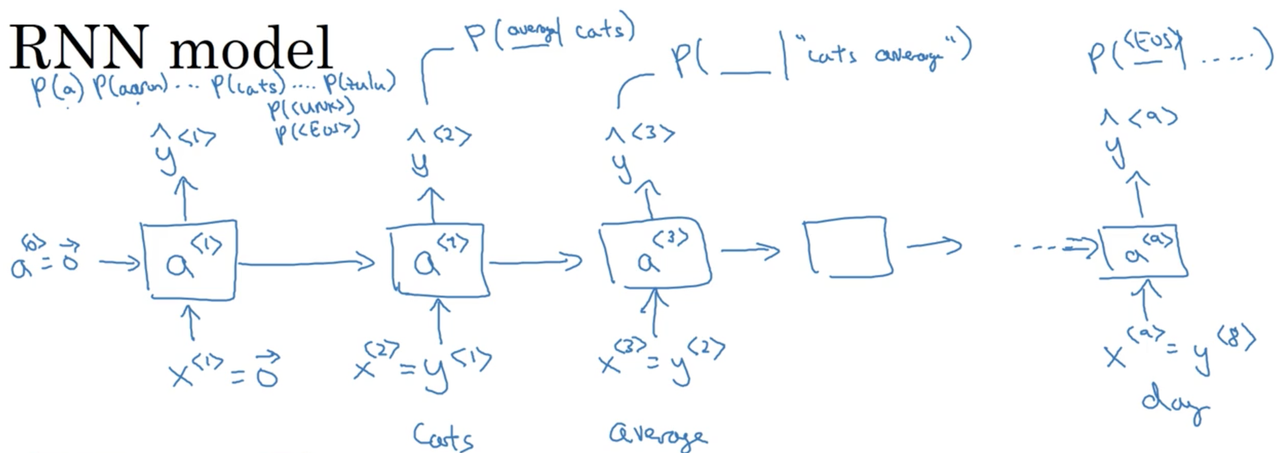
RNN model
At time 0, we compute some activation a^{<1>} as a function of some inputs x^{<1>}. In this case, x^{<1>} will just be set to the zero vector. Similarly, a^{<0>}, by convention, is also set to the zero vector.
a^{<1>} will make a softmax prediction over the entire vocabulary to determine \hat y^{<1>} (the probability of observing any of the tokens in your vocabulary as the first word in a sentence).
At the second timestep, we will actually feed the first token in the sequence as the input (x^{<2>} = y^{<1>}). This occurs, so forth and so on, such that the input to each timestep are the tokens for all previous timesteps. Our outputs \hat y^{<t>} are therefore P(x^{<t>}|x^{<t-1>}, x^{<t-2>}, ..., x^{<t-n>}) where n is the length of the sequence.
Note
Just a note here, we are choosing x^{<t>} = y^{<t-1>} NOT x^{<t>} = \hat y^{<t-1>}
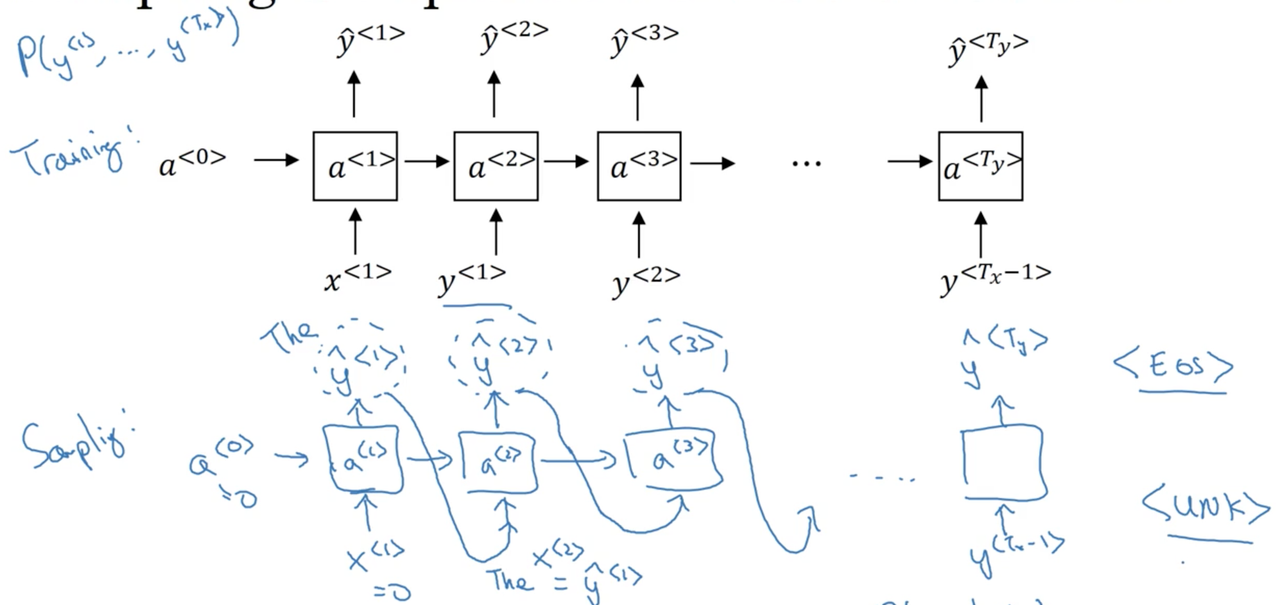
The full model looks something like:
There are two important steps in this process:
- Estimate \hat y^{<t>} = P(y^{<t>} | y^{<1>}, y^{<2>}, ..., y^{<t-1>})
- Then pass the ground-truth word from the training set to the next time-step.
The loss function is simply the cross-entropy lost function that we saw earlier:
- For single examples: \ell(\hat y^{<t>}, y^{<t>}) = - \sum_i y_i^{<t>} \log \hat y_i^{<t>}
- For the entire training set: \ell = \sum_i \ell^{<t>}(\hat y^{<t>}, y^{<t>})
Once trained, the RNN will be able to predict the probability of any given sentence (we simply multiply the probabilities output by the RNN at each timestep).
Sampling novel sequences
After you train a sequence model, one of the ways you can get an informal sense of what is learned is to sample novel sequences (also known as an intrinsic evaluation). Let's take a look at how you could do that.
Word-level models
Remember that a sequence model models the probability of any given sequence of words. What we would like to to is to sample from this distribution to generate novel sequence of words.
Note
At this point, Andrew makes a distinction between the architecture used for training a language modeling and the architecture used for sampling from a language model. The distinction is completely lost on me.
We start by computing the activation a^{<1>} as a function of some inputs x^{<1>} and a^{<0>} (again, these are set to the zero vector by convention). The softmax function is used to generate a probability distribution over all words in the vocabulary, representing the likelihood of seeing each at the first position of a word sequence. We then randomly sample from this distribution, choosing a single token (\hat y^{<1>}), and pass it as input for the next timestep.
Note
For example, if we sampled "the" in the first timestep, we would set \hat y^{<1>} = the = x^{<2>}. This means that at the second timestep, we are computing a probability distribution P(v | the) over all tokens v in our vocabulary V.
The entire procedure looks something like:
How do we know when the sequence ends?
If we included the
What if we generate an <UNK> token?
We can simply re-sample until we generate a non-<UNK> token.
Character-level models
We could also build a character-level language model. The only major difference is that we train on a sequence of characters as opposed to tokens, and therefore our vocabulary consists of individual characters (which typically include digits, punctuation, etc.)
Character-level language models are more computational expensive, and because a sequence of characters is typically much longer than a sequence of words (obviously) it is more difficult to capture the long range dependencies (as they are longer, of course).
However, using a character-level language models has the benefit of avoiding the problem of out-of-vocabulary tokens, as we can build a non-zero vector representation of any token using the learned character representations.
Note
You can also combine word-level and character-level language models!
Vanishing gradients with RNNs
One of the problems with the basic RNN algorithm is the vanishing gradient problem. The RNN architecture as we have described it so far:
Take the following two input examples:
Note
Take the "..." to be an sequence of english words of arbitrary length.
Cleary, there is a long range-dependency here between the grammatical number of the noun "cat" and the grammatical tense of the verb "was".
Note
It is important to note that while this is a contrived example, language very often contains long-range dependencies.
It turns out that the basic RNNs that we have described thus far is not good at capturing such long-range dependencies. To explain why, think back to our earlier discussions about the vanishing gradient problems in very deep neural networks. The basic idea is that in a network with many layers, the gradient becomes increasingly smaller as it is backpropagated through a very deep network, effectively "vanishing". RNNs face the same problem, leading to errors in the outputs of later timesteps having little effect on the gradients of earlier timesteps. This leads to a failure to capture long-range dependencies.
Note
Because of this problem, a basic RNN captures mainly local influences.
Recall that exploding gradients are a similar yet opposite problem. It turns out that vanishing gradients are a bigger problems for RNNs, but exploding gradients do occur. However, exploding gradients are typically easier to catch as we simply need to look for gradients that become very very large (also, they usually lead to computational overflow, and generate NaNs). The solution to exploding gradient problems is fairly straightforward however, as we can use a technique like gradient clipping to scale our gradients according to some maximum values.
Gated Recurrent Unit (GRU)
You've seen how a basic RNN works. In this section, you learn about the Gated Recurrent Unit (GRU) which is a modification to the RNN hidden layer that makes it much better at capturing long range connections and helps a lot with the vanishing gradient problems.
Recall the activation function for an RNN at timestep t:
As a picture:
Note
Two papers were important for the development of GRUs: Cho et al., 2014 and Chung et al., 2014.
Lets define a new variable, c for the memory cell. The job of the memory cell is to remember information earlier in a sequence. So at time <t> the memory cell will have some value c^{<t>}. In GRUs, it turns out that c^{<t>} == a^{<t>}.
Note
It will be useful to use the distinct variables however, as in LSTM networks c^{<t>} \not = a^{<t>}
At every timestep t, we are going to consider overwriting the value of the memory cell c^{<t>} with a new value, computed with an activation function:
The most important idea in the GRU is that of an update gate, \Gamma_u, which always has a value between 0 and 1:
Note
Subscript u stands for update.
To build our intuition, think about the example we introduced earlier:
We noted that here, the fact that the word "cat" was singular was a huge hint that the verb "was" would also be singular in number. We can imagine c^{<t>} as memorizing the case of the noun "cat" until it reached the verb "was". The job of the gate would be to remember this information between "... cat ... were ..." and forget it afterwords.
To compute c^{<t>}:
There is a very intuitive understanding of this computation. When \Gamma_u is 1, we simply forget the old value of c^{<t>} by overwriting it with \tilde c^{<t>}. When \Gamma_u is 0, we do the opposite (completely diregard the new candidate memory \tilde c^{<t>} in favour of the old memory cell value c^{<t>}).
Note
Remember that \Gamma_u can take on any value between 0 and 1. The larger the value, the more weight that the candidate memory cell value takes over the old memory cell value.
For our example sentence above, we might hope that the GRU would set \Gamma_u = 1 once it reached "cats", and then \Gamma_u = 0 for every other timestep until it reached "was", where it might set \Gamma_u = 1 again. Think of this as the network memorizing the grammatical number of the subject of the sentence in order to determine the number of its verb, a concept known as agreement.
As a picture:
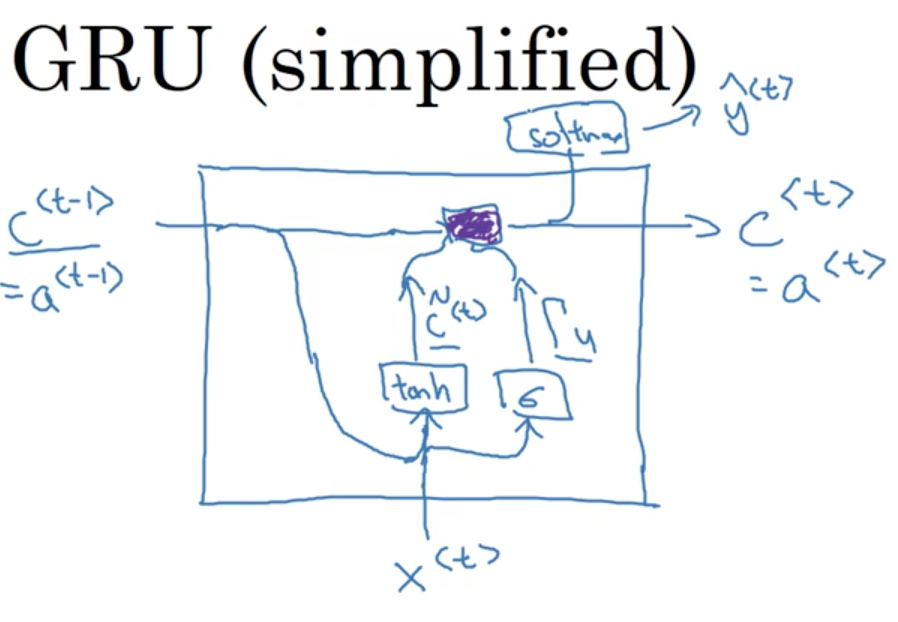
Note
The purple box just represents our calculation of c^{<t>}
GRUs are remarkably good at determining when to update the memory cell in order to memorize or forget information in the sequence.
Vanishing gradient problem
The way a GRU solves the vanishing gradient problem is straightforward: the memory cell c^{<t>} is able to retain information over many timesteps. Even if \Gamma_u becomes very very small, c^{<t>} will essentially retain its value across many many timesteps.
Implementation details
c^{<t>}, \tilde c^{<t>} \text{ and } \Gamma_u are all vectors of the same dimension. This means that in the computation of:
\ast are element-wise multiplications. Thus, if \Gamma_u is a 100-dimensional vector, it is really a 100-dimensional vector of bits which tells us of the 100-dimensional memory cell c^{<t>}, which are the bits we want to update.
Note
Of course, in practice \Gamma_u will take on values that are not exactly 0 or 1, but its helpful to image it as a bit vector to build our intuition.
Invoking our earlier example one more time:
we could imagine representing the grammatical number of the noun "cat" as a single bit in the memory cell.
Full GRU unit
The description of a GRU unit provided above is actually somewhat simplified. Below is the computations for the full GRU unit:
We introduce another gate, \Gamma_r. Where we can think of this gate as capturing how relevant c^{<t-1>} is for computing the next candidate c^{<t>}.
Note
You can think of r as standing for relevance.
Note that Andrew tried to establish a consistent notation to use for explaining both GRUs and LSTMs. In the academic literature, you might often see:
- \tilde c^{<t>} : \tilde h
- \Gamma_u : u
- \Gamma_r : r
- c^{<t>} : h
Note
(our notation : common academic notation)
Long Short Term Memory (LSTM)
In the last video, you learned about the GRU, and how that can allow you to learn very long range dependencies in a sequence. The other type of unit that allows you to do this very well is the LSTM or the long short term memory units, and is even more powerful than the GRU.
Recall the full set of equations defining a GRU above:
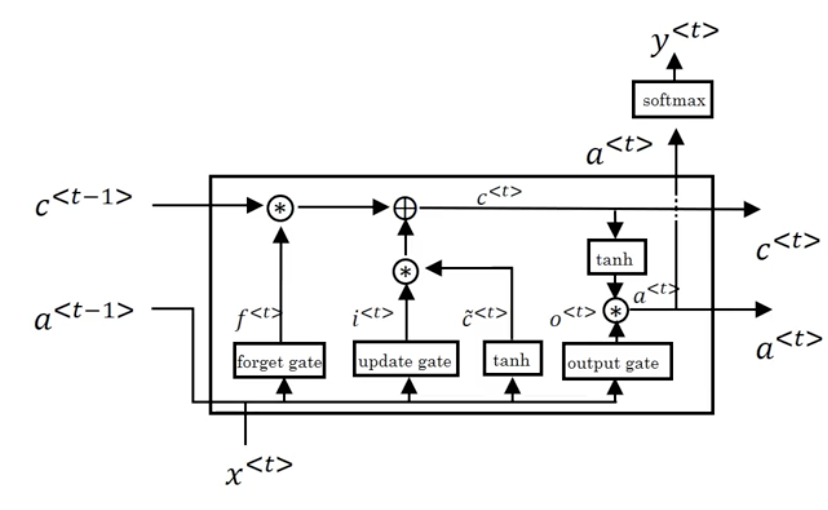
The LSTM unit is a more powerful and slightly more general version of the GRU (in truth, the LSTM was defined before the GRU). Its computations are defined as follows:
Note
Notice that with LSTMs, a^{<t>} \not = c^{<t>}. One new property of the LSTM is that instead of one update gate, \Gamma_u, we have two update gates, \Gamma_u and \Gamma_f (for update and forget respectively). This gives the memory cell the option of keeping the old memory cell information c^{<t-1>} and just adding to it some new information \tilde c^{<t>}.
We can represent the LSTM unit in diagram form as follows:
Note
See here for an more detailed explanation of an LSTM unit.
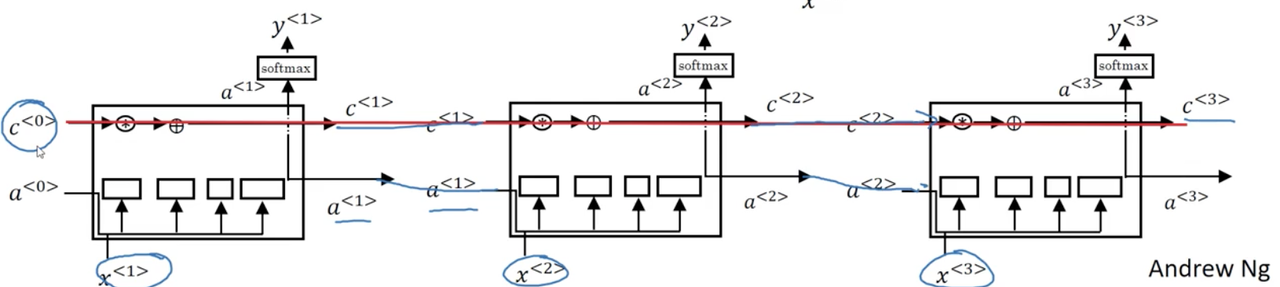
One thing you may notice is that if we draw out multiple units in temporal succession, it becomes clear how the LSTM is able to achieve something akin to "memory" over a sequence:
Modifications to LSTMs
There are many modifications to the LSTM described above. One involves including c^{<t-1>} along with a^{<t-1>}, x^{<t>} in the gate computations, known as a peephole connection. This allows for the gate values to depend not just on the input and the previous timesteps activation, but also on the previous timesteps value of the memory cell.
Bidirectional RNNs (BRNNs)
By now, you've seen most of the building blocks of RNNs. There are two more ideas that let you build much more powerful models. One is bidirectional RNNs (BRNNs), which lets you at a point in time to take information from both earlier and later in the sequence. And second, is deep RNNs, which you'll see in the next video.
To motivate bidirectional RNNs, we will look at an example we saw previously:
x^{(1)}: He said, "Teddy Roosevelt was a great President"
x^{(2)}: He said, "Teddy bears are on sale!"
Recall, that for the task of NER we established that correctly predicting the token Teddy as a person entity without seeing the words that follow it would be difficult.
Note
Note: this problem is independent of whether these are standard RNN, GRU, or LSTM units.
A solution to this problem is to introduce another RNN in the opposite direction, going backwards in time.
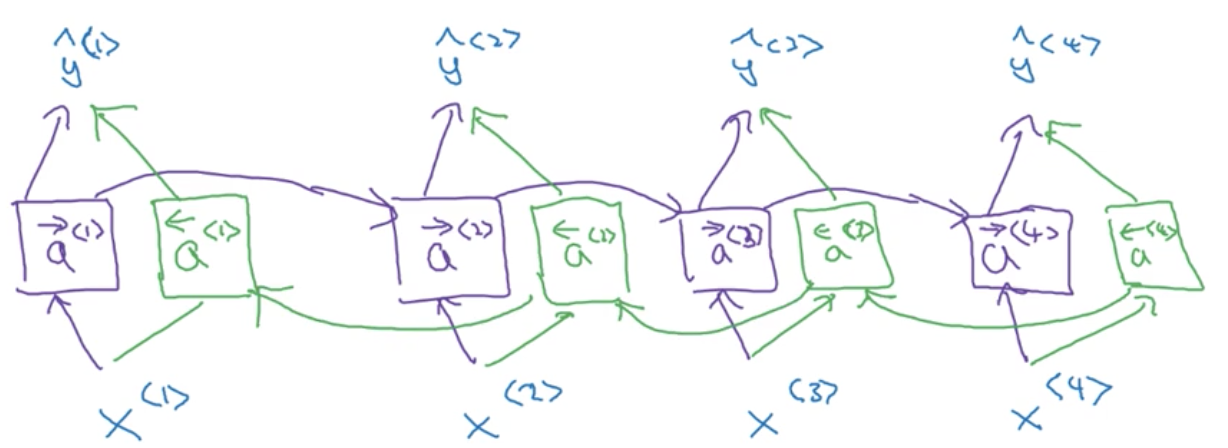
During forward propogation, we compute activations as we have seen previously, with key difference being that we learn two series of activations: one from left-to-right \overrightarrow a^{<t>} and one from right-to-left \overleftarrow a^{<t>}. What this allows us to do is learn the representation of each element in the sequence within its context. Explicitly, this is done by using the output of both the forward and backward units at each time step in order to make a prediction \hat y^{<t>}:
For the example given above, this means that our prediction for the token Teddy, y^{<3>}, is able to makes use of information seen previously in the sequence (t = 3, 2, ...) and future information in the sequence (t = 4, 5, ...)
Note
Note again that we can build bidirectional networks with standard RNN, GRU and LSTM units. Bidirectional LSTMs are extremely common.
The disadvantage of BRNNs is that we need to see the entire sequence before we can make any predictions. This can be a problem in applications such as real-time speech recognition.
Note
the BRNN will let you take into account the entire speech utterance but if you use our straightforward implementation, you need to wait for the person to stop talking to get the entire utterance before you can actually process it and make a speech recognition prediction
For applications like these, there exists somewhat more complex modules that allow predictions to be made before the full sequence has been seen. bidirectional RNN as you've seen here. For many NLP applications where you can get the entire sentence all the same time, our standard BRNN algorithm is actually very effective.
Deep RNNs
The different versions of RNNs you've seen so far will already work quite well by themselves. But for learning very complex functions sometimes is useful to stack multiple layers of RNNs together to build even deeper versions of these models.
Recall, that for a standard neural network we have some input x which is fed to a hidden layer with activations a^{[l]} which are in turn fed to the next layer to produce activations a^{[l+1]}. In this was, we can stack as many layers as we like. The same is true of RNNs. Lets use the notation a^{[l]<t>} to denote the activations of layer l for timestep t.
A stacked RNN would thus look something like the following:
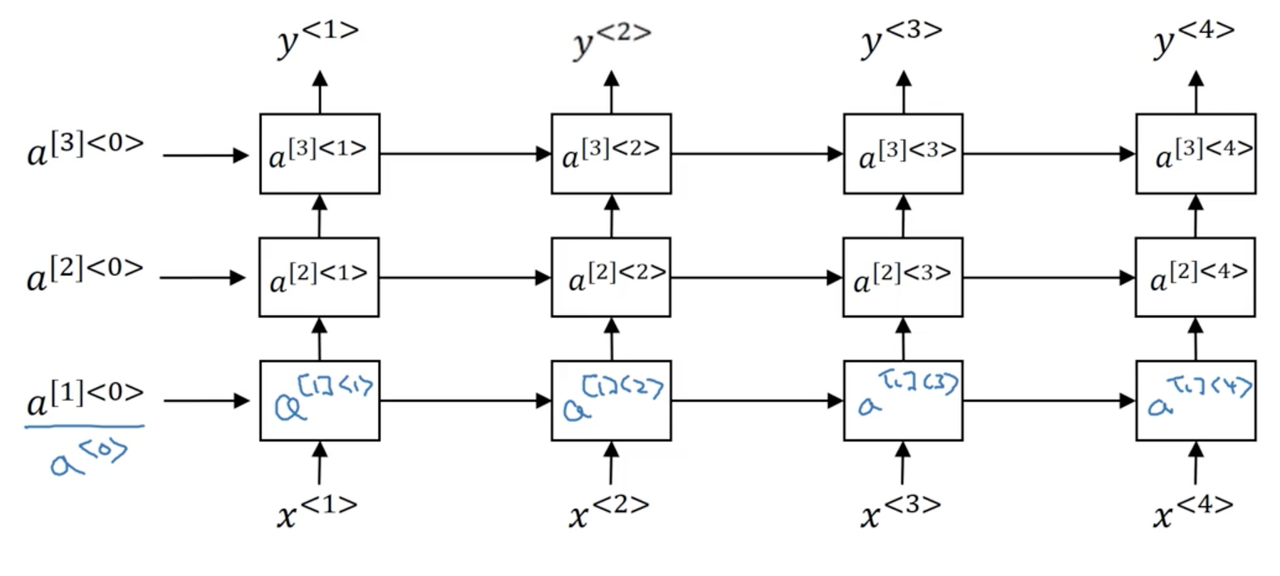
The computation of, for example, a^{[2]<3>} would be:
Notice that the second layer has parameters W_a^{[2]} and b_a^{[2]} which are shared across all timesteps, but not across the layers (which have their own corresponding set of parameters).
Unlike standard neural networks, we rarely stack RNNs very deep. Part of the reason is that RNNs are already quite large due to their temporal dimension.
Note
A common depth would be 2 stacked RNNs.
Something that has become more common is to apply deep neural networks to the output of each timestep. In this approach, the same deep neural network is typically applied to each output of the final RNN layer.